BioTac SP ROS stack

Description
Biotac SP ROS
This repository is for hosting the Biotac SP sensors sofware released under the lgpl3.0 license.
Requirements
Documentation
Hardware
- 3x Biotac SP sensors
- Biotac Board
- micro-USB power cable for connecting the Biotac board
- Cheetah SPI host
- USB-B cable.
- Host pc
Software
- Ubuntu Linux 18.04 LTS
- ROS Melodic installed and configured
Installation procedure:
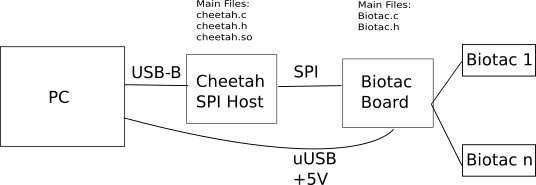
Step 1: Connect the equipment
Figure 1 shows the configuration setup
https://raw.githubusercontent.com/CNCR-NTU/biotac_sp/master/doc/Biotac.png
{kind=link}
Figure 1: Biotac setup
https://github.com/CNCR-NTU/biotac_sp/blob/master/doc/data_sampling.png
{kind=link}
Step 2: Update the OS and install base packets
$ sudo apt update & sudo apt upgrade -y & sudo apt dist-upgrade -y & sudo apt autoremove -y & sudo apt autoclean -y
$ sudo apt install build-essential git terminator
Step 3: clone the repository
$ cd ~/catkin_ws/src
$ git clone https://github.com/CNCR-NTU/biotac_sp_ros.git
Step 4: install the drivers
$ cd biotac_sp_ros
$ ./installCheetahDriver.sh
Step 5: compile and install
$ cd ~/catkin_ws
$ catkin_make
$ source devel/setup.sh
Step 6: run
$ roslaunch biotac_sp_ros biotac.launch
Understanding the data
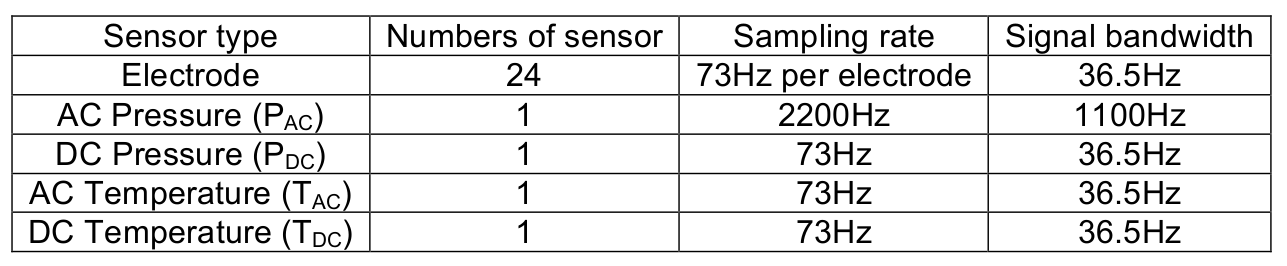
4x data frames are colected per second. Each frame is composed follows the recommended Default sampling sequence.
Table 1: Bandwidth and Sampling rate for Default Sampling Sequence at 4.4kHz
https://raw.githubusercontent.com/CNCR-NTU/biotac_sp/master/doc/data_sampling_bandwidth.png
{kind=link}
Figure 3 shows the Biotac SP electrodes distribution
https://github.com/CNCR-NTU/biotac_sp/blob/master/doc/Electrodes_distribution.png
{kind=link}
Figure 3 Biotac SP electrodes distribution
The output is a vector of 163 columns where:
[time, E1_s01, PAC_s01, E2_s01, PAC_s01,...,E24_s01, PAC_s01, PDC_s01, PAC_s01, PAC_s01, TAC_s01, PAC_s01, TDC_s01, PAC_s01, E1_s02, PAC_s02, E2_s02, PAC_s02,...,E24_s02, PAC_s02, PDC_s02, PAC_s02, PAC_s02, TAC_s02, PAC_s02, TDC_s02, PAC_s02, E1_s03, PAC_s03, E2_s03, PAC_s03,...,E24_s03, PAC_s03, PDC_s03, PAC_s03, PAC_s03, TAC_s03, PAC_s03, TDC_s03, PAC_s03]
where:
s01 - sensor 1
s02 - sensor 2
s03 - sensor 3
With exception of the time, each of the values is the average of the individual values of the 4x frames collected during 1 sec.
Contacts:
Computational Neurosciences and Cognitive Robotics Group at the Nottingham Trent University.
Pedro Machado pedro.baptistamachado@ntu.ac.uk
T.M. McGinnity martin.mcginnity@ntu.ac.uk
Git repository: https://github.com/CNCR-NTU/biotac_sp_ros
Notes
Files
biotac_sp_ros_v1.0.0.zip
Files
(2.1 MB)
| Name | Size | Download all |
|---|---|---|
|
md5:ee8664c85dea2231d70d61ec11904644
|
2.1 MB | Preview Download |