BRAIN Journal-Swarm Robotics with Circular Formation Motion Including Obstacles Avoidance-Figure 1b.The five steps of Methodology Approach
- 1. Department of Computer Science College of Information Technology University of Bahrain, Bahrain
- 2. Department of Computer Science College of Information Technology Islamic University of Gaza, Palestine
Description
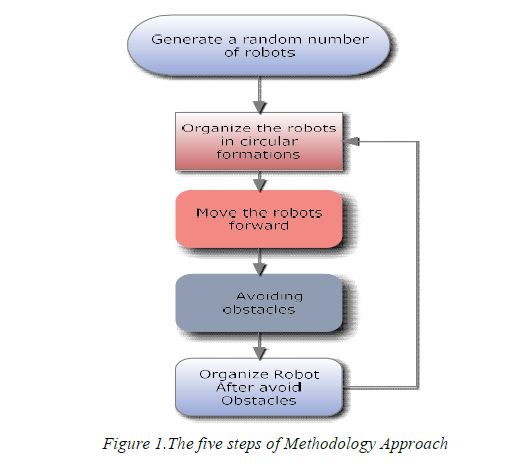
The General diagram of the proposed approach is shown in Figure 1.
A fundamental problem in collective robotics is to have the group organize into global formations or patterns. These include simple patterns like circles, lines, uniform distribution within a circle or square, etc. In the presence of a central controller, these tasks are trivial, but this is not the case in a distributed system. The main goal is to have self-autonomy robots, where each behaves independently from the others based its surrounding environment including other robots' behavior. Each robot might not be aware that it works within a group. Ducatelle et al.(Ducatelle, Di Caro, Pinciroli, Mondada, & Gambardella, 2011) proposed a collective behavior based on network routing, capable of guiding a robot from a source area to a target. Similarly to what happens in packet routing, the robots keep a table of the distance of other robots with respect to the target. A robot can then use the entries in the table and reach the target.
Notes
Files
Figure 1.The five steps of Methodology Approach.JPG
Files
(34.0 kB)
| Name | Size | Download all |
|---|---|---|
|
md5:e3c101215c553e07223b05ae46ef3639
|
34.0 kB | Preview Download |
{kind=link}