Published February 8, 2011
| Version v1
Figure
Open
Figure 5 in A dynamic model for the evolution of sabrecat predatory bite mechanics
Creators
Description
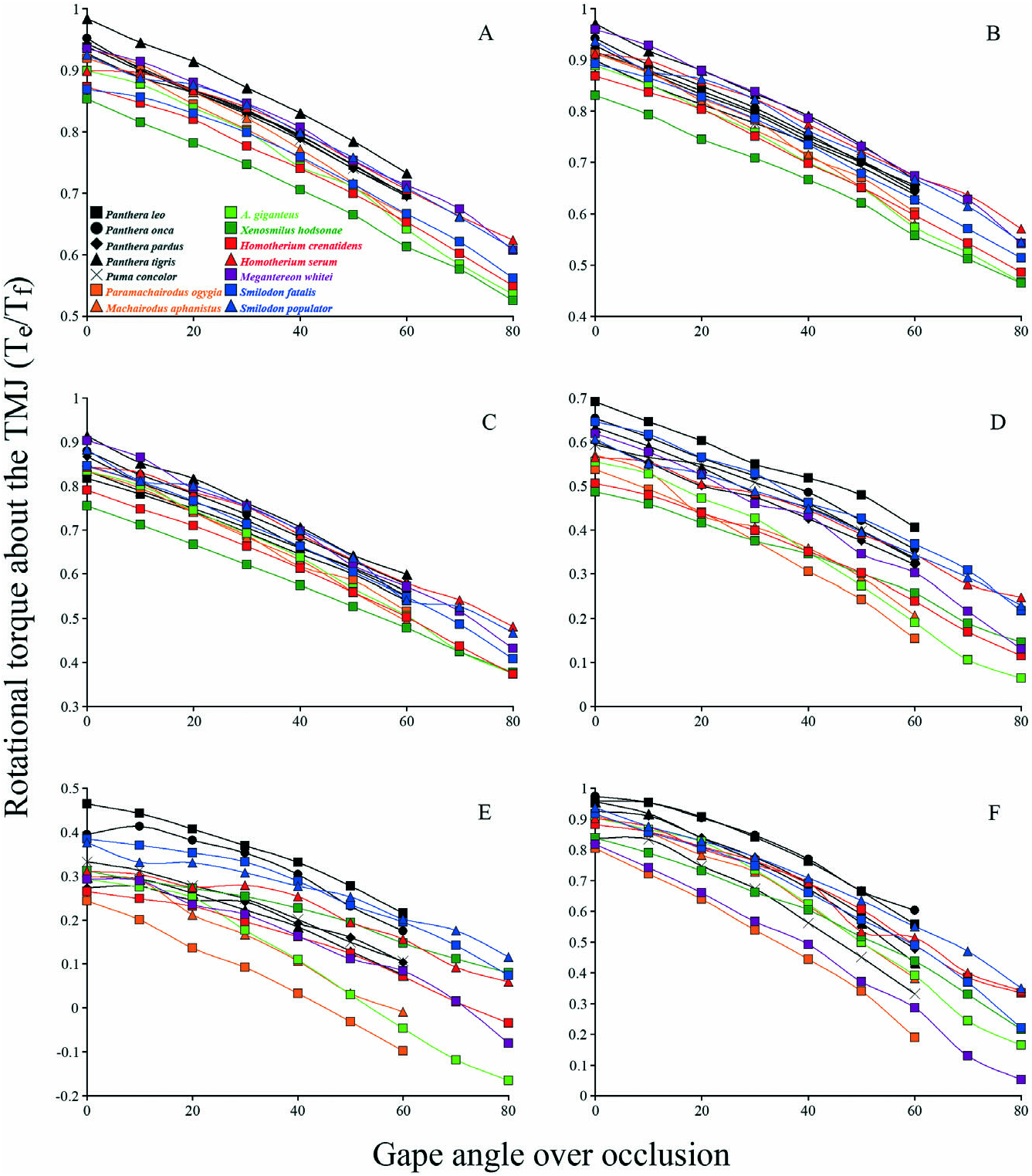
Figure 5. The relative ability of individual muscle fibres to generate rotational torque about the temporomandibular joint (TMJ) [effective (rotational) torque about the TMJ divided by the theoretical force output from the muscle fibre (Te/Tf)] at gape angles from occlusion to maximal inferred gape in: A, deep masseter + zygomaticomandibularis fibre 1; B, deep masseter + zygomaticomandibularis fibre 2; C, deep masseter + zygomaticomandibularis fibre 3; D, deep masseter + zygomaticomandibularis fibre 4; E, deep masseter + zygomaticomandibularis fibre 5; F, superficial masseter.
Notes
Files
figure.png
Files
(1.2 MB)
| Name | Size | Download all |
|---|---|---|
|
md5:5322aba937ab2c2b2879b287758b448a
|
1.2 MB | Preview Download |
{kind=link}
Linked records
Additional details
Related works
- Is part of
- Journal article: 10.1111/j.1096-3642.2010.00675.x (DOI)
- Journal article: urn:lsid:plazi.org:pub:301C295E5576FFD1403D3746D65CFF94 (LSID)
- Journal article: https://zenodo.org/record/5440205 (URL)