Published February 8, 2011
| Version v1
Figure
Open
Figure 3 in A dynamic model for the evolution of sabrecat predatory bite mechanics
Creators
Description
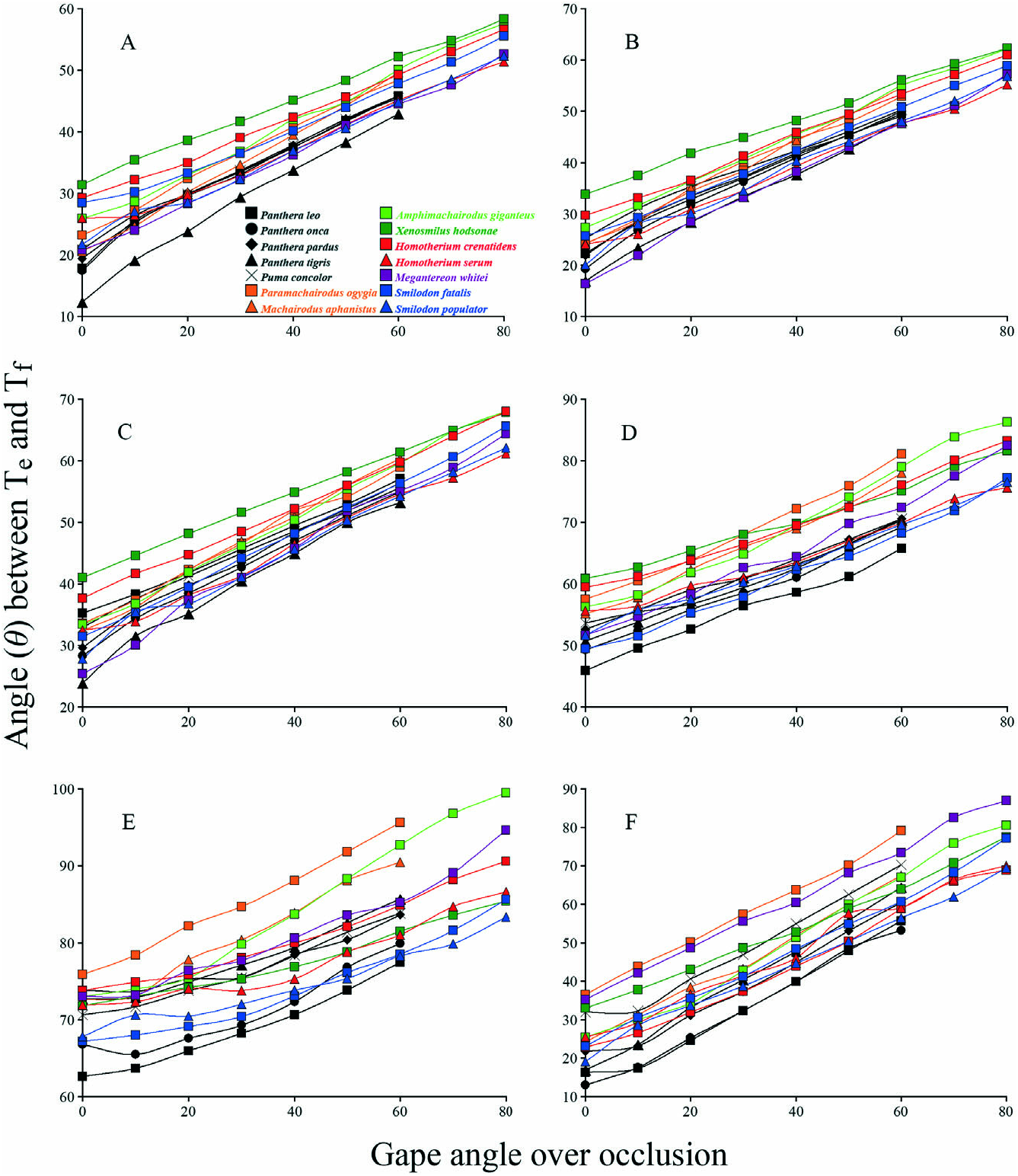
Figure 3. The angle (Q) between the effective (rotational) torque about the temporomandibular joint (Te) and the theoretical force output from the muscle fibre (Tf) at gape angles from occlusion to maximal inferred gape in: A, deep masseter + zygomaticomandibularis fibre 1; B, deep masseter + zygomaticomandibularis fibre 2; C, deep masseter + zygomaticomandibularis fibre 3; D, deep masseter + zygomaticomandibularis fibre 4; E, deep masseter + zygomaticomandibularis fibre 5; F, superficial masseter.
Notes
Files
figure.png
Files
(1.2 MB)
| Name | Size | Download all |
|---|---|---|
|
md5:0d6216230210f04288a9dc0d3d4555e4
|
1.2 MB | Preview Download |
{kind=link}
Linked records
Additional details
Related works
- Is part of
- Journal article: 10.1111/j.1096-3642.2010.00675.x (DOI)
- Journal article: urn:lsid:plazi.org:pub:301C295E5576FFD1403D3746D65CFF94 (LSID)
- Journal article: https://zenodo.org/record/5440205 (URL)