Data Set htwddKogRob-InfDynSim for Localization in Highly Crowded Environments
Creators
- 1. University of Applied Sciences Dresden, Artificial Intelligence and Cognitive Robotics Labs
Description
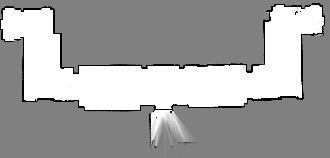
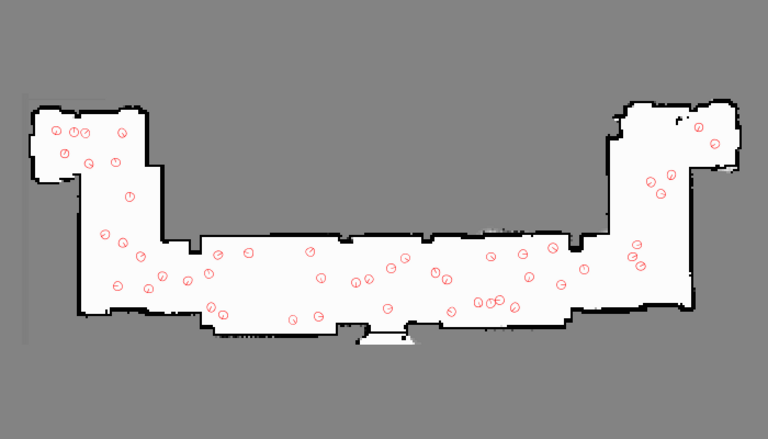
This data set presents a major challenge for robot localization in highly crowded environments. The total distance travelled over all runs is 113.3 km. 50 dynamic obstacles (see htwddKogRob-InfDynSim_dynObstacles.png) were inserted into the map (see htwddKogRob-InfDynSim.png | 1px \(\widehat{=}\) 0.1m).
The work was first presented in:
- A Fuzzy-based Adaptive Environment Model for Indoor Robot Localization
- Authors: Frank Bahrmann, Sven Hellbach, Hans-Joachim Böhme
- Date of Publication: 2016/10/6
- Conference: Telehealth and Assistive Technology / 847: Intelligent Systems and Robotics
- Publisher: ACTA Press
Additionally, we present a video with the proposed algorithm and an insight of this dataset under:
- youtube.com/AugustDerSmarte
- https://www.youtube.com/watch?v=26NBFN_XeQg
Instructions for use
The zip archives contain ascii files, which hold the log files of the robot observations and robot poses. Since this data set was recorded in a simulated environment, the logfiles include both a changed starting position and a ground-truth pose. For further information, please refer to the header of the logfile. To simplify the parsing of the files, you can use these two Java snippets:
Laser Range Measurements:
List<Double> ranges = new ArrayList<>(numOfLaserRays);
List<Error> errors = new ArrayList<>(numOfLaserRays);
String s = line.substring(4);
String delimiter = "()";
StringTokenizer tokenizer = new StringTokenizer(s, delimiter);
while(tokenizer.hasMoreElements()){
String[] arr = tokenizer.nextToken().split(";");
boolean usable = (arr[0].equals("0")?false:true);
double range = Double.parseDouble(arr[1]);
ranges.add(range);
errors.add(usable?Error.OKAY:Error.INVALID_MEASUREMENT);
}Poses:
String poseString = line.split(":")[2];
String[] elements = poseString.substring(1, poseString.length()-1).split(";");
double x = Double.parseDouble(elements[0]);
double y = Double.parseDouble(elements[1]);
double phi = Double.parseDouble(elements[2]);
Notes
Files
htwddKogRob-InfDynSim.png
Files
(25.7 GB)
| Name | Size | Download all |
|---|---|---|
|
md5:4082ded98cbe1f636ba95f88dd5b6c62
|
156.9 kB | Preview Download |
|
md5:edc420ee282fd325ea51ef99bf95c14b
|
36.2 kB | Preview Download |
|
md5:5b4d7df8bce919a0a842428e95367064
|
2.1 GB | Preview Download |
|
md5:da23217e44e88a56c6e8565ad3ea72b7
|
2.1 GB | Preview Download |
|
md5:0f55aa62b1f3129041f09f6bda4ac2fc
|
1.9 GB | Preview Download |
|
md5:47bc2a094e45baf9a90a4683abd5682d
|
2.0 GB | Preview Download |
|
md5:b289e1af79a222e5d078c12b1a8af4e5
|
2.5 GB | Preview Download |
|
md5:06b4d212b4aadf3dc146e72a91e12953
|
2.0 GB | Preview Download |
|
md5:7ba9e265c52d07ea13efe3a07f8cbaec
|
3.2 GB | Preview Download |
|
md5:500b2ac01395abcd0fb48e0317f98122
|
2.1 GB | Preview Download |
|
md5:883eddce02ed10b7c951482da3b346d7
|
1.6 GB | Preview Download |
|
md5:555f5bd138649b2dab7bde1079b5d3b1
|
2.9 GB | Preview Download |
|
md5:50cfbc8ac9f991b4fa801f52e36da4a9
|
1.7 GB | Preview Download |
|
md5:c5da08bcd186a9f047144010d0ff86b0
|
1.6 GB | Preview Download |
{kind=link}
{kind=link}